
“Cuando quiero que algo no se resuelva
lo encomiendo a un comité”
Napoleón Bonaparte

A lo largo de las últimas décadas nos hemos relacionado en las fábricas con robots y máquinas de alta tecnología, permitiendo mejorar los ratios de producción, posicionando a las empresas con ventaja competitiva en los diferentes mercados (metal, automoción, manufactura, etc.).
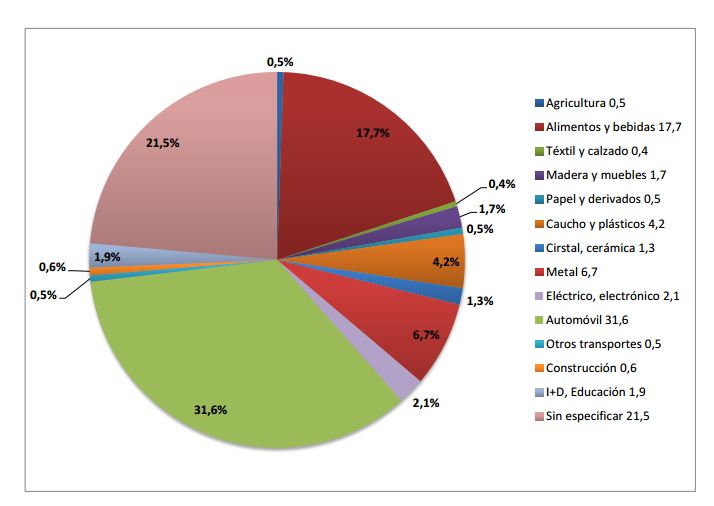
Gráfico de utilización de robots por sectores (Fuente AER-ATP 2014)
Es por ello que merece una pequeña introducción que espero sea de tu interés.
La Robótica Industrial es el área de la ingeniería que se ocupa de diseñar, desarrollar, aplicar, utilizar y mantener los robots en los distintos sectores industriales con el fin de mejorar la productividad y/o mejorar las condiciones de los operarios.
Las principales asociaciones de referencia son:
-AER-ATP (España) : Asociación Española de Robótica y de Automatización de las tecnologías de la Producción. www.aeratp.com
-RIA (USA): Robotics Industries Association. www.robotics.org
-IFR (Mundial): Internacional Federation of Robotics. www.ifr.org
-EFAC (Europa): European Factory Automation Committe. www.wfac.org
-AFRI (Francia): Asociación Francesa de robótica Industrial.
-JARA (Japón): Japan Robos Association
Según la AER-ATP alrededor de un 20% (Informe 2015 à Datos 2014) de aplicaciones robóticas se destinan a procesos de soldadura. En esta web hay informes estadísticos muy interesantes referentes a la implantación robótica en el ámbito nacional e internacional.
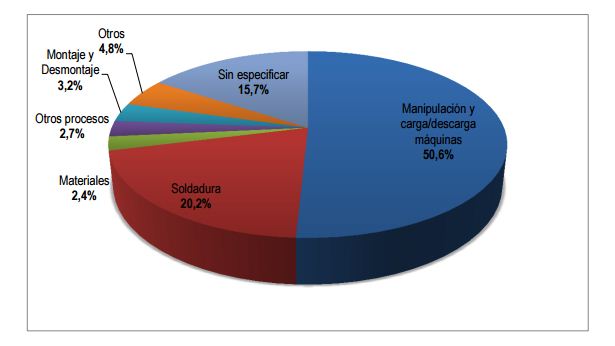
Gráfico por aplicaciones industriales de robots en España (Fuente AER-ATP 2014).
Aquí puedes ver el informe nacional del año 2015.
Los principales fabricantes son:
Además de los fabricantes, en el mundo industrial toman especial relevancia los integradores que aúnan la ingeniería, el desarrollo de aplicaciones específicas y la programación a medida.
Reductores y transmisiones permiten los diferentes grados de libertad. Disponer de las mínimas holguras (backlash) es característica imprescindible, junto con la combinación, de dimensiones y peso reducido para la obtención de un gran rendimiento.
Dentro de los reductores destacan:
-Reductor planetario –> Vídeo de funcionamiento.
-Reductor HDUC (harmonic drive) –> Vídeo de funcionamiento.
-Reductor Cyclo –> Vídeo de funcionamiento.
-Etc.
En cuanto a transmisiones las más utilizadas son las compuestas por engranajes de varios tipos (rectos, cónicos, helicoidales, etc.), correas (dentadas y lisas), cadenas, etc.
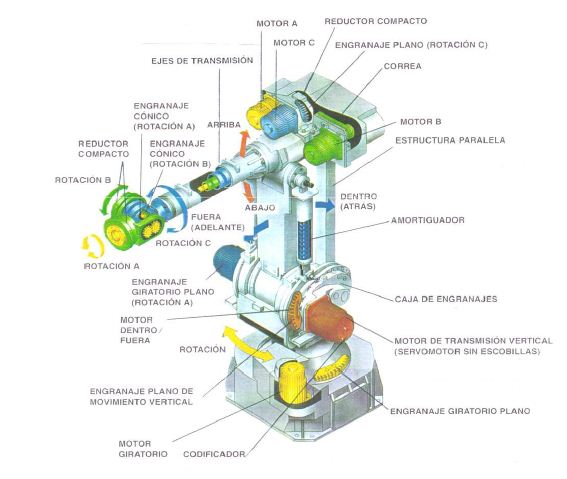
Disposición típica de componentes de un robot.
En función de la aplicación para la que se diseña el robot existen actuadores de varios tipos:
–Neumáticos: simple y doble efecto, cilindro rotativo (efecto piñón-cremallera), posicionamiento rotativo, motores de paletas, de pistones (axiales o radiales), etc.
-Eléctricos: servomotores DC (control por inducido, excitación o imanes permanentes), servomotores AC (síncrono o asíncrono), motores paso a paso (de imanes permanentes, de reluctancia variable, híbridos, etc.).
-Hidraúlicos: motor de pistones, motor de paletas.
Los accionamientos a motor eléctrico AC (síncrono) poseen la ventaja de la regulación de frecuencia comandados por variadores.
Los actuadores deben combinar precisión, capacidad de carga y velocidad.
Es importante a la hora de realizar una compra de un robot el análisis de repuestos en el mercado (existencia de stock), bajo coste y fácil mantenimiento. Las facilidades para obtener repuestos o asistencia técnica debe considerarse para una óptima mantenibilidad del equipo.
Los sensores externos e internos son otra de las partes que componen un robot.
En cuanto a los sensores internos pueden ser:
- De presencia (inductivos, capacitivos, ópticos, ultrasonidos, etc.).
- De posición: analógicos (potenciómetros, resolver, sincro, etc.) y digitales (encoders absolutos, encoders incrementales, reglas ópticas, etc.).
- De velocidad (tacogeneratriz).
Los sensores externos son los más visuales cuando vemos un robot:
- De contacto.
- De reflexión.
- De fibra óptica.
- Basados en láser.
- Inductivos
- Efecto Hall
- De presión neumática.
- De tacto
- Etc.
Para llevar a cabo el control cinemático y dinámico es necesario implementar funciones de control. Estas funciones definen tipos de trayectorias cartesianas (evolución de cada coordenada en el tiempo). Esto permite generar, además de realizar muestreos e interpolación de trayectorias.

En cuanto a la programación existen diversos lenguajes. Puede realizarse por guiado o de forma textual. Muchos de estos lenguajes han sido desarrollados inicialmente por diferentes universidades:
AL (Universidad de Standford 1974)
LM (Universidad de Grenoble 1981)
Y otros por los fabricantes:
KRL (KUKA)
KAREL (FANUC)
AS (KAWASAKI)
Personalmente he trabajado con RAPID (ABB). Aquí os dejo el manual para todo aquel que quiera profundizar en este interesante mundo de la automática que es la programación de robots. Puedes ver la aplicación RobotStudio para realizar programación y simulación offline.
Los principales campos de mejora en la robótica son los relacionados con la incorporación de la inteligencia artificial (IA). Esto permite implementar visión con reconocimiento del entorno, optimizando las relaciones hombre-máquina y las condiciones del seguridad, programación, operación remota y trabajo multi estaciones robotizadas.
En este link puede obtenerse una introducción histórica de la robótica industrial, además de los conceptos, clasificaciones y definiciones que las diferentes normas internacionales dan a un robot.
En un próximo post profundizaré sobre uno de los campos de mayor aplicación de la robótica industrial: la soldadura.
Quizá te interese